I) Quest ce que lodométrie ?Lodométrie est une science dont lobjet détude est la mesure et le controle du mouvement dun objet. Le mouvement dun objet dans lespace est un processus dynamique qui obéi au lois de la cinématique. Controler un mouvement , cest non seulement controler la position de lobjet , mais également sa vitesse et son accélération... La position est un concept statique qui ne fait pas intervenir le temps. Par contre , la vitesse et laccélération sont des concepts dynamiques . Le robot vector de par sa conception mécanique est un mobile non holonomique.Deux roues motrices indépendantes propulsent lensemble et permettent une grande variété de mouvements. II) Les capteurs de mouvementAfin d'assurer un controle fiable de la position du mobile , l'utilisation de capteurs de position est indispensable. Plusieurs options s'offre a nous : - Les capteurs optiques du type "fourche optique".
C'est la solution la plus économique et la plus simple a mettre en oeuvre. La précision obtenue n'est cependant pas extraordinaire . Ces capteurs reposent sur le principe de la coupure d'un faisceau lumineux ( souvent de l'infrarouge ).Le schémas suivant montre comment j'ai adapté ce principe a mon robot Vector : Une simple roue de "mécano" et une fourche optique permettent de controler le mouvement avec une résolution de 8 pas par tour ! Ce n'est pas extraordinaire , je vous l'accorde ,mais pour une première expérimentation dans ce domaine cela permettra tout de même de valider certains principes.
L'image ci-dessous illustre un montage permettant une bien meilleure précision. Une roue dentée montée sur l'arbre primaire du moteur sert d'opturateur. L'alternance des dents produit un signal alternatif sur la diode réceptrice. Le réglage est assez pointu et demande l'utilisation d'un oscilloscope car vu la taille des dents , la position de la fourche doit être déterminée avec une assez grande précision. J'ai utilisé de la patte à mastic pour fixer la fourche opto ( séchage très lents ... ). Pour vous faire une idée du résultat obtenu : sachant que la roue comporte 50 dents et que le réducteur utilisé a un rapport de 1:33,2 , un tour de roue correspond a exactement 1660 impusions !
- Les compteurs incrémentaux.
cette solution est beaucoup plus onéreuse mais permet d'obtenir une trés grande précison. On trouve sur le marché des compteurs incrémentaux qui ont une résolution de 4000 pas par tours , et même plus ! Par une simple dérivation des impulsions délivrées par un tel capteur , on peut également obtenir une indication précise sur la vitesse
III) Etude de quelques mouvements simples.A) Notations.Les notations suivantes seront utilisées tout au long de l'étude
e : Lentraxe entre les deux roue mobiles
R : Le rayon dune roue
N : Le nombre dimpulsions que délivre un capteur pour un tour de roue ( Pour Vector cela correspont au nombre de « trou » dans la roue de mécano ).
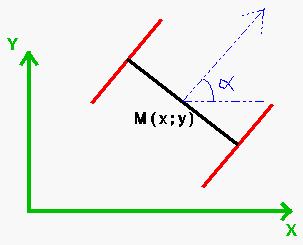
Un triplet de coordonnée  permet de décrire simplement la position du robot mobile comme le montre la figure ci-dessous. permet de décrire simplement la position du robot mobile comme le montre la figure ci-dessous.
La position de la roue droite du robot sera donnée par  et celle de la roue gauche par et celle de la roue gauche par  . .
B) Etude dun « tournant à droite »La position initiale du robot est . On effectue un virage à droite en bloquant la roue droite (  = 0 ) et en actionnant la roue gauche ( = 0 ) et en actionnant la roue gauche (   0 ). Le but de cette étude est de trouver la position finale du robot 0 ). Le but de cette étude est de trouver la position finale du robot  . Cette position finale ne dépendant que du nombre dimpulsion reçu par le capteur de la roue gauche (). . Cette position finale ne dépendant que du nombre dimpulsion reçu par le capteur de la roue gauche ().
1) calcul de la distance parcourue par la roue gauche. 2) Calcul de la variation de la direction du robot ( ** ) 3) Calcul de la position initiale de la roue droite ( xd ; yd ; *d ) 4) Calcul de la position finale du robot ( x ; y ; * )
C) étude dun « tournant à gauche ».La même étude donne les résultats suivants : 1) La distance parcourue par la roue droite 2) la variation de direction du robot 3) La position initiale de la roue gauche 4) la position finale du robot
D) Etude du mouvement de « demi-tour »Lasservissement des moteurs doit pouvoir garantir que ng = - nd durant toute la durée du mouvement. Acette condition on obtient les résultats suivants :

Date de création : 28/10/2005 @ 18:12
Dernière modification : 31/01/2008 @ 07:53
Catégorie : Robotique
Page lue 14465 fois
 Prévisualiser la page Prévisualiser la page
 Imprimer la page Imprimer la page
|





 Arduino
Arduino Arduino
Arduino
 30 membres
30 membres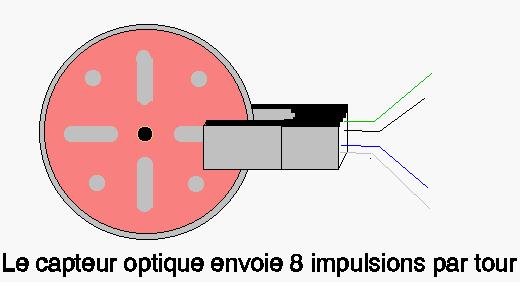


 Haut
Haut 