Electronica
http://cgrosse1.free.fr/guppy/
Mon premier Robot (Robotique)
La robotique est un domaine vivant qui permet d'associer électronique , informatique et mathématiques ! Le robot vector est né en 1994.Sa naissance ne s'est pas faite en un jour ! Passionné d'électronique depuis plusieurs années , une multitude de montages électroniques s'étaient accumulés dans mon laboratoire : Un synthétiseur vocal, un télémetre à ultrason , des interfaces pour moteurs pas à pas ...
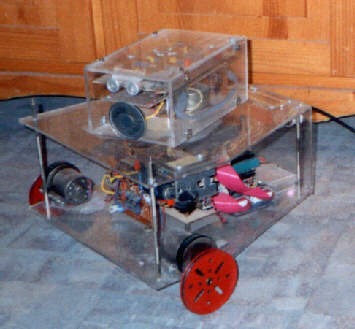 | Dés lors il suffisait d'assembler ces montages pour faire un robot , le tout controlé par un microcontroleur. Un bon vieux Z80 orchestre le tout. Au fil du temps VECTOR pris sa forme actuelle : - Un corps de plexiglas ( facile a découper et a assembler... )
- Deux roue motrices et une roue folle lui assurent une bonne mobilitée
- Une tête orientable a l'aide d'un moteur pas à pas.
- Un synthétiseur vocal.
- Un télémetre ultrason.
- Un ecran LCD de 16 caractêres.
- Une unité de gestion de l'énergie à relais.
- Une interface série pour communiquer avec un PC.
- et... un mini avertisseur sonore ! |
 |
VECTOR devait être un robot mobile autonomne, capable de se déplacer tout seul dans un environnement inconnu ! Pour cette première réalisation j'ai du me résoudre a rennoncer en partie a cette idée , et cela pour deux raisons principales :  | VECTOR ne dispose pas de sa propre source d'énergie et sa conception mécanique trés simplifiée n'est pas prévue pour embarquer les batteries nécessaires à un fonctionnement autonomne.Mais ceci n'est qu'un problême technique qui sera un jour résolu ! |
| Les algorithmes permettant a un robot mobile de se déplacer dans un environement inconnu sont complexent. Ce sujet de recherche passionnant et vaste soulève de nombreuses questions : Quel modèle mathématiques pour représenter l'espace réel ? Comment implémenter un programme qui puisse prendre des décisions , même dans des situations imprévisibles ? Avec des capacités d'apprentissages ? Ces problêmes ne sont plus du domaine de la technique pure mais de la théorie ... |
Une interface conviviale sous windows permet de piloter le robot vector . l'écran ci-dessous vous donne un apercu de cette interface :


{kind=link}
{kind=link}