
La robotique est un domaine vivant qui permet d'associer électronique , informatique et mathématiques ! Le robot vector est né en 1994.Sa naissance ne s'est pas faite en un jour ! Passionné d'électronique depuis plusieurs années , une multitude de montages électroniques s'étaient accumulés dans mon laboratoire : Un synthétiseur vocal, un télémetre à ultrason , des interfaces pour moteurs pas à pas ...
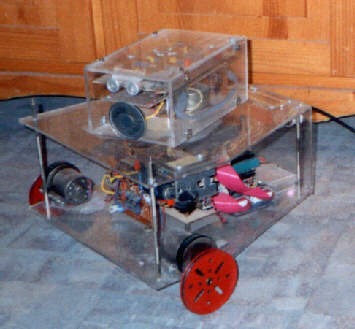 | Dés lors il suffisait d'assembler ces montages pour faire un robot , le tout controlé par un microcontroleur. Un bon vieux Z80 orchestre le tout. Au fil du temps VECTOR pris sa forme actuelle : - Un corps de plexiglas ( facile a découper et a assembler... ) |
 |
| VECTOR ne dispose pas de sa propre source d'énergie et sa conception mécanique trés simplifiée n'est pas prévue pour embarquer les batteries nécessaires à un fonctionnement autonomne.Mais ceci n'est qu'un problême technique qui sera un jour résolu ! | |
| Les algorithmes permettant a un robot mobile de se déplacer dans un environement inconnu sont complexent. Ce sujet de recherche passionnant et vaste soulève de nombreuses questions : Quel modèle mathématiques pour représenter l'espace réel ? Comment implémenter un programme qui puisse prendre des décisions , même dans des situations imprévisibles ? Avec des capacités d'apprentissages ? Ces problêmes ne sont plus du domaine de la technique pure mais de la théorie ... |
Une interface conviviale sous windows permet de piloter le robot vector . l'écran ci-dessous vous donne un apercu de cette interface :
 |
 |
Bonjour,
la vue de l'écran de l'interface montre un travail bien fait. Seulement en ne partageant pas avec tous votre conception, c'est difficile de réagir objectivement. Vous nous mettez l'eau à la bouche sans rien nous offrir à mettre sous la dent. Soyez généreux, partagez votre conception; ce qui nous permettra d'apprécier et de partager nos modifications, nos suppléments...sur ce site.
Cordialement Mikael CAMBRIDGE!
 Site créé avec GuppY v4.5.8 - © 2004-2005 - Licence Libre CeCILL
Site créé avec GuppY v4.5.8 - © 2004-2005 - Licence Libre CeCILL {kind=link}
{kind=link}